【摘要】 伺服系統負載慣量比對快速響應性,運行穩定性很重要。本文給出了伺服驅動系統常見傳動機構的負載慣量計算方法及實際應用案例。
【關鍵字】慣量計算、慣量比、伺服系統
0 引言
轉動慣量(Moment of Inertia)是剛體繞軸轉動時慣性(回轉物體保持其勻速圓周運動或靜止的特性)的量度,用字母I或J表示。轉動慣量在旋轉動力學中的角色相當于線性動力學中的質量,可形象地理解為一個物體對于旋轉運動的慣性。在負載加速和減速的過程中,慣量是一個非常重要的參數,因此在運動控制中需要非常熟練的掌握常用傳動機構的慣量計算方法。
本文整理了各種常見機構的慣量計算方法,給出兩種應用案例中,雷賽伺服電機選型計算例題。
1 服驅動系統中,常見5種傳動機構的負載慣量計算方法
1.1常見物體慣量計算
模型1、長為L的細棒,旋轉中心通過細棒的中心并與細棒垂直,如下圖所示。
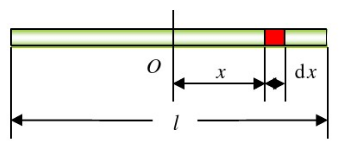
在棒上離軸x處,取一長度元dx,假設棒的質量密度為λ,則長度元的質量為dm=λdx,根據轉動慣量計算公式: 
得到 
將  代入上式,得
代入上式,得 
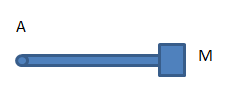
模型2、長為L的細棒,旋轉中心通過細棒的一端A并與細棒垂直,如下圖所示。
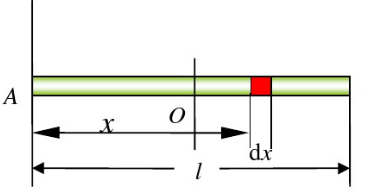
同理可得出
將  代入上式,得
代入上式,得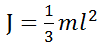
模型3、半徑為R的質量均勻的細圓環,質量為m,旋轉中心通過圓心并與環面垂直。
取一長度元dx,假設棒的質量密度為λ,則長度元的質量為 ,根據轉動慣量計算公式:
,根據轉動慣量計算公式:
 得到
得到
將 代入上式,得
代入上式,得
模型4、質量為m、半徑為R、厚度為h的圓盤或實心圓柱體,繞軸心轉動。

取任意半徑為r,寬度為dr的薄圓環,設ρ為圓盤的密度,dm為薄圓環的質量,則此圓環轉到的慣量為  ,將
,將 代入
代入
得
由 , 可得
, 可得
按照此公式,直徑為D的圓柱體繞中心軸旋轉的慣量為:
 ,其中L為圓柱長度, 為密度。
,其中L為圓柱長度, 為密度。
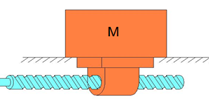
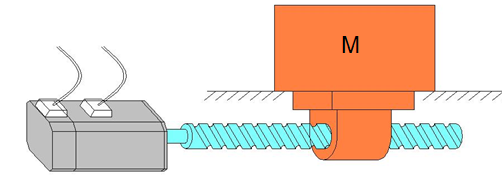
模型5、絲桿帶動的負載慣量:
注:式中Pb為絲杠導程(螺距)
總結:模型1與模型2可以應用于均勻的長條形或棒狀負載結構的慣量計算。
模型3則可以應用于同步輪負載結構的慣量計算。
模型4則可以應用于絲桿本身慣量的計算或圓柱體結構的慣量計算。
模型5則可以應用于絲桿帶動的負載慣量計算。
注:常見剛體慣量計算助記

1.2服驅動系統中,常見5種傳動機構的負載慣量計算方法
在上述五種模型的基礎上,可以給出伺服驅動系統中,常見5種傳動機構的負載慣量計算方法(絲桿機構、同步帶輪機構,齒輪齒條結構、圓盤結構、長臂結構)
A、 絲桿結構:
絲桿慣量 
聯軸器慣量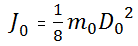
絲桿上負載慣量
加速力矩
勻速力矩
總力矩 

B、 同步帶輪/齒條結構:

負載慣量
皮帶慣量
同步輪/齒輪慣量
勻速力矩
加速力矩
總力矩

C、 轉盤結構:
轉盤慣量
聯軸器慣量
加速力矩

長臂結構:
長臂慣量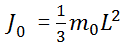
負載慣量 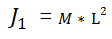
加速力矩

2 計算選型舉例
雷賽公司的交流伺服電機一般有不同慣量的型號可供用戶選用,如60、80機座電機都有中慣量和小慣量兩種。下面通過兩個常見案例的負載慣量計算,合理電機選型,來說明減小慣量不匹配的方法。
2.1 絲桿結構
已知:負載重量m=200kg,螺桿螺距 =20mm,螺桿直徑 =50mm,螺桿重量 =40kg,摩擦系數μ=0.002,機械效率η=0.9,負載移動速度V=30m/min,全程移動時間t=1.4s,加減速時間t1=t3=0.2s,靜止時間t4=0.3s。請選擇滿足負載需求的最小功率伺服電機。
解:1) 計算折算到電機軸上的負載慣量
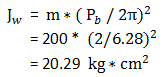
重物折算到電機軸上的轉動慣量
螺桿轉動慣量
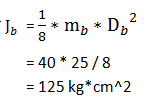
總負載慣量 
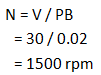
2)計算電機轉速
電機所需轉速
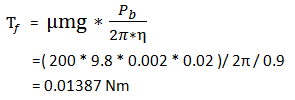
3) 計算電機驅動負載所需要的扭矩
克服摩擦力所需轉矩
重物加速時所需轉矩
螺桿加速時所需要轉矩
所需最大轉矩

選定電機方案:運動系統總慣量為145.29 ,需要最大轉矩為12.686Nm。雷賽ACM13030M2E-51-B電機,額定轉速2500RPM,額定力矩12NM,轉子慣量29 ,負載慣量比=145/29≈5倍,符合要求。
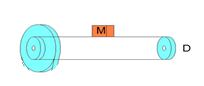
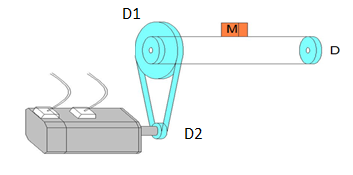
2.2 同步輪結構
已知:快速定位運動模型中,負載重量M=5kg,同步帶輪直徑D=60mm,D1=90mm,D2=30mm,負載與機臺摩擦系數μ=0.003,負載最高運動速度2m/s,負載從靜止加速到最高速度時間100ms,忽略各傳送帶輪重量,選擇伺服電機。
解:
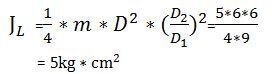
1)計算折算到電機軸上的負載慣量
2)計算電機驅動負載所需要的扭矩
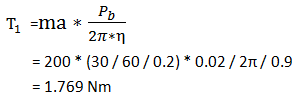
克服摩擦力所需轉矩
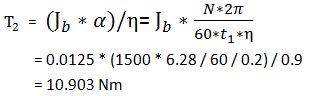
加速時所需轉矩

3)所需轉矩
4)計算電機所需要轉速

選定電機方案:
由上述計算結果,可選擇雷賽伺服電機ACM6006L2H(額定轉矩1.9NM,額定轉速3000RPM,電機慣量0.6 ),慣量比為:5 / 0.6=8.3倍。
筆者在一些客戶現場發現, 有部分用戶選用了以下型號電機:ACM6004L2H(額定力矩1.27NM,峰值轉矩3.81NM,額定轉速3000RPM,電機慣量0.42 kg.cm^2)。如果選擇了此方案,系統慣量比為5/0.42=11.9倍,動態響應性能及定位完成時間都會比選擇ACM6006L2H伺服方案要差,合理的慣量比對整個運動系統的動態性能有很大的提升。
3 結論:
伺服驅動系統中,常見傳動機構有五種:絲桿機構、同步帶輪機構,齒輪齒條結構、圓盤結構、長臂結構。工程師宜熟練掌握各種機構的負載慣量計算方法。在此基礎上,才能正確計算慣量比。要提高伺服系統的快速響應特性,首先必須提高機械傳動部件的諧振頻率,即提高機械傳動部件的剛性和減小機械傳動部件的慣量。其次通過增大阻尼壓低諧振峰值也能提高快速響應特性創造條件。第三,如果負載慣量較大時,可以考慮采用減速機構,實現負載慣量與電機慣量之間的慣量比在合適范圍。在部分應用案例中,也可以考慮選用慣量更大的電機,來滿足降低慣量比,提高加速性能和穩定性的要求。最后,伺服驅動控制算法很多新技術的成功應用,也為伺服系統更高精度、高平穩性運行提供了可能。更詳細慣量比合理取值的論述,可參考雷賽公司文章《伺服電機負載慣量比的合理取值》。












